
人物〡天津大學黃田教授:并聯機器人助力中國制造2025
轉載自高工機器人
各位來賓下午好,非常榮幸在這個會上做報告。這個題目(《并聯機器人助力中國制造2025》)特別大,我主要是介紹我們團隊近幾年來做的關于混聯機器人的一些工作。
大家都知道,工業機器人是一個非常大的范疇,混聯機器人基本上屬于工業機器人下面的一個分支,它主要是圍繞大型結構件加工提出的。大型結構件有很多的例子,包括我們航天火箭、飛機火車,主要有兩個特點:一個是尺寸非常大,要求精度很高;同時,還需要現場制造。
那么解決的方案,基本上有三大類:
第一類,就是用我們傳統的大型的機床加工,包括龍門機床。還有現場的,主要就是便攜式裝備,適合開敞性比較好的現場局部的制造,比如飛機里面的鉆鉚,半自動或全自動的鉆床,或者是像這樣的爬壁的機器人。這邊下邊這個圖是德國開發的用于大型管道的機器人。
還有一類是我們特別熟知的機器人移動工作站,它包括兩類,一類采用串聯結構,這類機器人應用范圍是最廣的,第一個適合大范圍的移動,能夠執行焊接,拋錨,對加工精度要求不是很高。但是是在一個非常大的場合。
還有一類上個世紀80年代開始有,本世紀初開始發展,到今天才得到了比較廣泛應用的機器人,叫做混聯機器人。那么這種機器人就可以做成移動工作站,比較適合于大型導軌上,以機床和機床相當的精度,也就是達到了比如說十個微米或者二十微米的精度,進行局部高速精密加工。這里是一些相關的圖片,左上角的圖片,就是在空客A350寬體客機機翼高速加工一個混聯機器人。

目前在世界上,我個人了解,并聯機器人和混聯機器人已經很多了。但是,真正的在工程中得到應用的,基本上就是這么三類:第一類就是Tricept機器人。這個公司叫做LOXIN機器人,開始在汽車領域,現在在航空領域用。第二類就是Exechon機器人,是瑞典Exechon發明的同名機器人,就是右上角那個圖的機器人。還有一類是Sprint Z3機器人,這是德國公司發明的機器人,主要用在了大型飛機鋁合金大型結構件的高速加工。這些裝備應該說都是高端裝備,成套使用,每臺裝備售價應該在一千萬元人民幣左右。



這個可以從四個方面體現出來:
第一個是它的速度。它的速度和這個所謂的關節型機器人相當,遠遠比機床高,最高可以實現3個G的速度,機床基本上實現不了。精度,略比機床要低,但是遠遠高于工業機器人,也就是我們關節臂這樣的機器人,關節臂,就是轉動出現很小的誤差之后,一伸長馬上誤差就出來了。所以說串聯的關節型工業機器人很難去用到道級加工精度。剛性遠遠低于機床,但是比關節型機器人要高。然后,它的柔性接近于關節型機器人,比機床高。我覺得它是機床技術和機器人技術二者的一個結合。右邊列出了Tricept 845的技術指標,從精度、技術、重量等等,都是按照機床的規格來制造的。
天津大學從03年開始研究這個,至今已經有十幾年了。從最開始做了兩個系列的:一個是Rtivariant,一開始用于鋼構的加工,我們在上海世博會的一些結構是用這個機器人做出來的。后來感覺做粗加工不行,又做精加工,從2010年以后我們側重的研究了這個,后來提高機床的精度,也得到了一些應用。
下面有這么幾個問題,也就是說我們在串聯機器人的研究或者混聯機器人研究過程之中遇到的一些問題,想和大家交流一下。
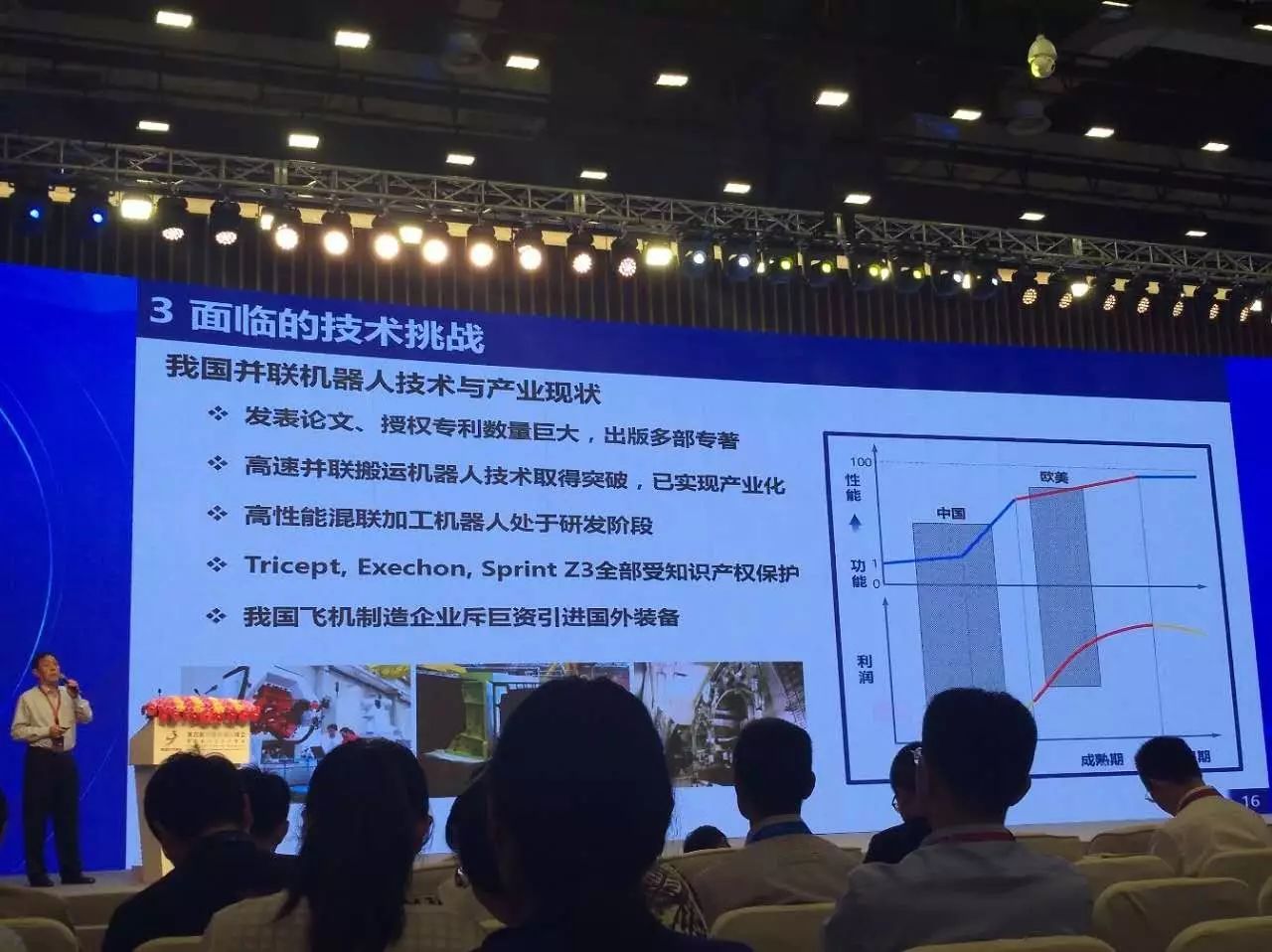
從高性能混聯機器人這個研究來說,我們國家還是起步階段,沒有得到大的應用,基本上還是在實驗室的階段。另外,像Tricept、Exechon、Sprint在飛機領域都得到了應用,但是都被保護起來了。我們國家花了很多錢購置這樣的裝備,比如我剛才說的Sprint Z3這樣的裝備,就賣400萬歐元。我們國家在飛機制造企業已經引進了鉆鉚,我們也引入了Tricept這樣的裝備,每一臺都是上千萬。
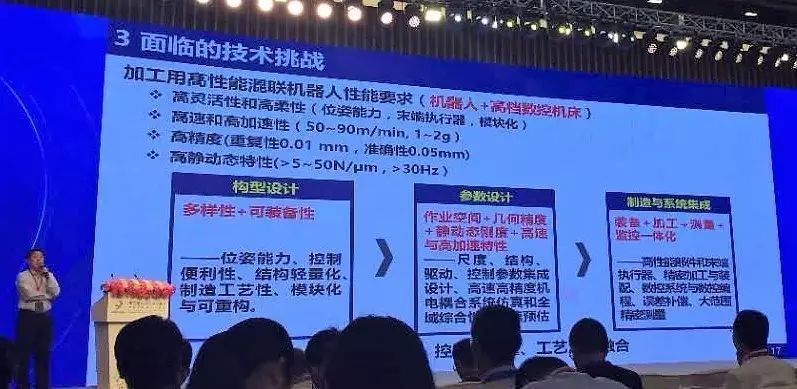
從機器人角度來說,第一:要有高靈活性和高柔性,也就是說它要有比較強的位姿能力。
第二:就是有高速、高加速的特性,相比國外做的,它的精載速度要達到60-90m/min,這就是高性能的機器人目標。它的性能達到2個G。
第三:還有一個高精度,就是重復精度要達到10個微米,它的準確性要達到0.05毫米。
第四:還有它的高靜動態特性,我們一般做關節型機器人的分析,它的頻率不會高于10HZ,這樣的話用不到企業里頭。如果使得這個機器人達到30HZ以上。這樣才能用到加工里去。
這樣實際上就面臨了各種各樣的挑戰:
第一個就是如何找到新的構型。新的TOP結構優多樣多樣性的,它能夠保證它能夠輕量化,如何從眾多的構型里頭找到具有工程使用價值的結構,這是第一個面臨的挑戰。
第二個它要達到特定的性能,第一個要功能,第二個就是性能。性能無非就是它的精度,它的剛度,它的動態特性要滿足加工的要求。這里對它的尺度、結構、驅動和控制參數等都需要進行設計。
第三個就是說如何在工程里使用,這里涉及到各種各樣的技術,有裝備技術、有加工技術、有測量技術等等。
我今天主要就是介紹前兩個,一個是如何來找到新的構型,第二個如何做它的設計。
第一個,我這個取得的是自主創新,因為我們要突破國外產權,我們要發明自己的機器人,如何做這個事情?第二個如何突破關鍵技術,使得它的精度達到工程應用的要求?
要做到這兩點,實際上從構型設計里,就是我們被稱之為功能與性能同時驅動的設計方法。功能就是要實現多少的自由度,性能就是要達到相關的加速特性、相關的精度,如何來實現實際上面臨了很多的技術挑戰。
那么,第一個就是說如何來找到可以突破國外知識產權的新機構。這是面臨的挑戰。
現在剛才我列寫的Tricept已經有了。前者,我們分析了一下,它的稱之為位置型的并聯機構加上AC頭構成了一個混聯機器人。后者,也就是底下這個Z3頭是AB擺,是姿態型的并聯機構,加上一個XYZ長行導管,這是拓樸結構5軸的本質。
第一個如何找到這樣的拓樸結構?我們提出了一種找到這種新機構的方法。基本的要點它是一個平面運動鏈再添加一個運動鏈,關鍵就是在這些拓樸構型里面找到合適的構型。為此,我們就提出了三個拓樸構型優先準則:第一個就是找到合適的軸線方位,或者你是姿態型的,或者位置型的。
第二個非常重要,你所有的腿的設計,要滿足一定的力學準則,使得它具有好的效果。以前研究到那一步綜合完了就完了,不再考慮這樣的事情。
第三個就是你這種機器人必須要做成一種模塊,具有可重構性。
按照這樣三個準則,實際做下來,真正的有用的很少。就是我們右邊打的綠勾的有用。其中兩個國外已經發明了,就是Exechon和Z3,那第三個在哪?
為此我們發明這樣的機構,它的平名就是由位置并聯機構加AC頭,然后加上第三條腿,構成了這樣一個5自由度混合并聯機器人。
那么這個機器人有什么優點?它是作業式機器人,比現有的Diamond少6個負荷。同時我們可以在這個中間那條腿和兩個腳上安裝直線光圈,可以直接感知,進而保證它的位置精度。還有一些其他的一些優點。
那么應該說我們發明的Diamond機器人是具有我們國家知識產權的一款機器人,利用這個機器人,或者機器人的模塊,就可以重構出各種各樣的大型構建的現場加工裝備。比如可以做成立式的、臥式的布局,也可以做成躺型的布局,適合現場加工的需求。這里我就不想多說了。
第一個是參數設計,實際上你有了拓樸構型之后,如何來進行參數設計,還是比較復雜的問題。那么,原來的設計光考慮運動學,我們這里不光考慮運動學,而且考慮了動力學性能,也就是它的剛度和動力學性能。這里我們給出了整個相關的設計流程。這是最終的設計結果,右邊是靜力學和動態特性,大家可以看到它的凈剛度和低頻率基本上還是小型的臥式的加工方式。
第二個就是綜合性能保障技術。從機器人本體來說面臨兩的個挑戰:第一個如何控制好,像機床一樣控制好,這個是面臨的問題。第二個就是精度的問題。
從控制的角度來說,它和串聯的機器人完全一樣面臨著兩大困惑。第一個也就是說你的折算到電機上的,重力負載也是變化的。這兩個,重力擾動也是隨位形變化,所以要找到適合于這種變化的控制器。
目前來說,我們國家西門子已經開發出來,但是我們國家這個數控系統的制造商還沒有提供,我們目前主要在這樣開放式的數控系統上做了相關的工作。大體的思路,也就是說在一個位形下整理好,在若干個位型下做好。然后反權重加權法,得到全域的控制參數。基本思路是這樣的。
第二個就是如何提高它的精度。剛才提到直線光柵,提出了精度的補償方法,達到像機床一樣。這是傳統的串聯的工業機器人和大多數的并聯機器人做不到的。這是它的工藝保障技術,我不再多說了,包括誤差補償、如何裝配。
前兩者就是要保證它和機床一樣,要保證它的技術指導精度。在此基礎上可以采用兩種方法進行補償,一個就是把空間做劃分,直接補償;還有一個就是用系統參數辨識的方法進行補償。這個是我們的一些結果。
這個是我們去年做的樣機,是比較小的樣機,我們叫Diamond 600,它的位置的重復精度在9個μ。這個重復精度應該高于串聯的機器人的數量級。這個應該在中間那張圖片體積誤差,是60個μ的體積誤差,在一米的工作空間里是這樣的范疇。同時,我們也對進行NAS加工,誤差達到了9μ。
最后工程應用,我介紹兩個例子,有幾個錄像。第一個就是我們主軸用的是7千瓦的主軸,主要體現速度和加速度的特性,這個速度可以達到1個G的加速度。然后進一步輕量化,我們想突破2個G,現在制造了1個G的加速度。這個是演示在整個空間里的位姿能力。這個是我們做了雙機的,右邊是支撐部,左邊加工部。然后,有一個薄臂器,表示這兩個機器可以同步的加工。
最后談兩個應用。第一個應用我們沒有做到飛機上,第一個面向國家這個點火工程。它里頭的大口徑非球面光學零件的拋光主要用這樣的工序,用精拋,快拋,然后小磨頭的拋光裝備。
然后傳統用ABB機器人在做,串聯機器人。串聯機器人的特性,頻率低,所以振幅特別大。我們采用這個之后,大幅度的提高了它的精度和材料的去除率,這個去除率與原來的水平比較,整整提高了一倍。這是第一臺樣機。這是我們第二臺樣機,就是做拋光。這個X軸和Y軸、Z軸的正負遠遠小于串聯機器人。這是我們做的第一個應用,現在已經在用了。
然后第二個,這個裝備主要圍繞著飛機的制孔。這個最難的一個問題,打在鋁上沒有問題,比較難的是在鈦合金和復材上打孔。傳統打孔工藝就是用了多把刀,來回換刀,加工副材用一種刀,加工鈦合金用另外一種刀。還有用螺旋洗的方式加工,用專業螺旋加工。我們提出的思路是直接采用混聯機器人,發揮它的高剛度,直接采用混聯機器人加螺旋加工就可以做出來。
這是我們初步做的實驗,這個疊層構建是一層鈦合金,一個是復材。前面是鈦合金,目前加工一個孔,就用一把刀,然后用4分鐘把這個疊層構建,加工19.5毫米的孔,用了4分鐘。傳統刀具要N把刀。這個加工效率還是非常好的,而且加工精度達到了要求。比如我們4分鐘做一個孔,板厚度10mm,孔徑19.05mm。這個粗糙度也滿足了要求,用一把刀直接加工,而且沒有冷卻液。
這個國際上,據我了解,英國兩家在做這個。英國的鵬達狄(音譯)在這樣做,直接用機器人,直接進行螺旋銑孔的技術。應該說,我們這臺機器人是世界上第三家能夠干這件事的。右邊這個是我們加工鈦合金,加工復材、它的表面粗糙度、孔徑的一些圖片,報名這個機器人做這件事還是有很強的優勢的。
最后做一個總結,我們發明了和研制出了一種高性能的混聯機器人,這種機器人應該說在大型結構件,特別是航天航空軌道交通這樣局部的加工上有很好的前景。我們期待與企業開展深入的合作,把我們這種機器人能夠推向市場,助力中國制造2025。
阿童木機器人是辰星(天津)自動化設備有限公司旗下的品牌,是國內領先的并聯機器人制造商,創始團隊來自并聯機器人研發知名高校-天津大學;阿童木機器人擁有鉆石、金剛、閃電全系列并聯機器人核心自主知識產權;阿童木機器人在整機性能、作業可靠性、現場使用經驗方面具有無法比擬的優勢,目前已率先實現對英國和俄羅斯的出口,創國產機器人整機出口的先例。阿童木機器人力圖做世界一流的并聯機器人企業。阿童木蜘蛛手在食品、制藥、電子、日化等行業的分揀、搬運、裝箱、抓取等環節都有涉及。
在這個機器逐漸替代人工的時代,并聯機器人有著很好的發展前景,但是市場競爭很激烈。阿童木蜘蛛手在質量、性能等方面都達到了國外技術水平,甚至趕超他們。

